时钟晶体振荡器的抖动定义与作用
来源:http://www.taiheth.com 作者:泰河电子晶振技术部 2019年06月18
高速通信和测量系统的不断进步需要系统时钟和参考的更高性能水平。过去可接受的性能可能不足以支持高速同步设备。也许最重要和最不被理解的时钟性能测量是抖动。
这次讨论的目的有四个。
1. 直观地定义抖动,并讨论它的属性。
2. 解释抖动如何降低系统性能。
3. 描述测量抖动的各种实用方法,包括每种方法的相关性和易用性。
4. 提供指定高速时钟和相关设备的指南。
抖动定义:
o 抖动:“数字信号从其理想位置及时的重要瞬间的短期变化”(ITU)。
数字数据流中的预期边缘永远不会出现在所需的位置。定义和测量这些边沿的定时精度(抖动)对于同步通信系统的性能至关重要。
具有抖动边缘的数字波形
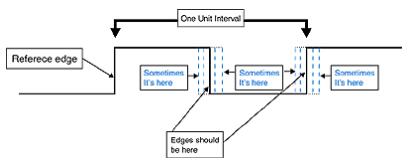
图1
术语的定义:
a. 以单位间隔表示的抖动:单个单位间隔是时钟频率的一个周期。这是标准化的时钟周期。以单位间隔表示的抖动将抖动的大小描述为一个单位间隔的小数部分。
b. 以度(度)表示的抖动:以度表示的抖动以度为单位描述抖动的幅度。其中一个周期等于360度。
c. 以绝对时间表示的抖动:以时间单位表示的抖动以适当的数量级(通常为皮秒)描述抖动的幅度。
d. 表示为功率测量的抖动以弧度或单位间隔平方为单位进行描述。通常以dB为单位表示相对于一个周期平方 (来自Bellamy) [1]
e. 模式抖动:模式相关的抖动。有时也称为翻边。本质上不随意。一般是次谐波的结果。在时域中查看时,它被视为多种抖动模式。模式抖动是确定性的,这是一种可归因于独特源的现象。本讨论中提到的所有其他抖动本质上是随机的,并且可能仅被描述为关于时间的随机变量。
例如:
假设时钟晶体振荡器速率为155.52 MHz。一个单位间隔将等于信号的周期,1 / 155.52MHz = 6.43nsec。= 360度
假设100 ps Pk-Pk的抖动。
100 Ps的抖动= .01555单位间隔(UI)的抖动= 5.598度。抖动 (所有Pk-Pk)所有三个测量都描述了相同的抖动量。
对于抖动功率,使用rms(一个sigma )测量。对于上述情况,我们将Pk-Pk近似为
)测量。对于上述情况,我们将Pk-Pk近似为 RMS值的7 或7倍,放置有效值。抖动功率为.0000049 UI 2。{(。01555/7)2。以dB表示,相对于一个单位间隔,在这种情况下的抖动功率将是10log(.0000049)= -53.1dB ui。如稍后将看到的,可以从功率谱密度(相位噪声)测量导出抖动。表1涉及155.52 MHz系统时钟中各种抖动测量。
RMS值的7 或7倍,放置有效值。抖动功率为.0000049 UI 2。{(。01555/7)2。以dB表示,相对于一个单位间隔,在这种情况下的抖动功率将是10log(.0000049)= -53.1dB ui。如稍后将看到的,可以从功率谱密度(相位噪声)测量导出抖动。表1涉及155.52 MHz系统时钟中各种抖动测量。
表1
抖动带宽和频谱内容
图1中边缘的位移是噪声的结果。噪声具有光谱含量和功率。因此,图1中的边缘抖动也具有频谱内容。图1中的边缘随时间随机变化,但导致抖动的噪声在所有频率上不一定均匀。由于100 kHz噪声,10 kHz噪声引起的抖动可能大于或小于抖动。时钟抖动的频谱内容根据用于生成时钟的技术而有很大差异。测量的抖动也随测量技术和抖动带宽而变化。指定或测量的抖动不正确可能导致不必要的成本或系统性能不佳。参见参考文献[2,3]有关定义和指定电信系统中抖动的其他信息。各种时钟源的抖动特性将在本文后面讨论。
抖动如何影响系统性能
抖动对通信系统的影响远远超出了本讨论的范围。有关更彻底的治疗,请参阅参考文献[1,4]。简单的讨论可能有助于理解数字系统中抖动的有害影响。
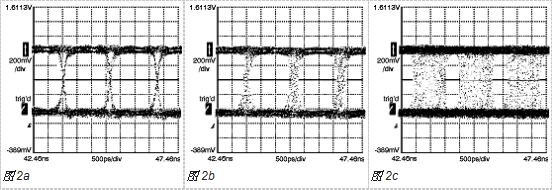
通过同步通信系统传输的每一位数据都在接收器处对其值进行采样。采样数据只能具有逻辑1或0的值。采样数据的最佳点位于每个发送时钟周期的中心。为了执行此功能,接收器将其自己的时钟与用于传输数据的时钟对齐。图2,a,b和c分别表示理想的,典型的和损坏的数据流。通常称为“眼图”,每个图是由于噪声或抖动引起的边缘放置的累积图形画像。理想情况下,采样发生在“眼睛”的中心。随着边缘抖动的增加,明显的眼睛开始闭合。结果,出现错误的可能性,即.... 将逻辑1误认为是零的可能性更大。石英晶体振荡器噪声引起的抖动只是电信系统抖动的一个来源。系统设计人员必须考虑电信系统中的许多噪声源。时钟源引入的抖动是噪声的一个组成部分,只能成为“误差预算”的一部分,必须根据性能要求和成本进行权衡。
测量技术
时域测量
使用延迟线的边缘到边缘抖动
时钟抖动的真正衡量标准是时钟边沿随时间的精确位置。检查边缘位置的最直接方法是使用示波器观察边缘。遗憾的是,使用标准示波器技术无法在绝对时间内识别各个时钟边沿。使用标准示波器测量的任何抖动都是由于触发不稳定造成的。因此,使用示波器(即使是非常好的示波器)进行直接波形测量也不是有效的抖动测量。另一种技术用于定位参考边缘,与时间进行区分,并检查后续边缘上的抖动。图3以典型配置说明了这种方法。
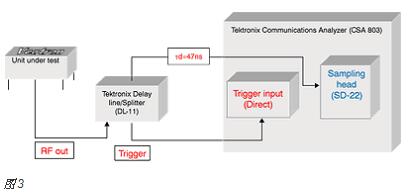
被测单元的输出被馈入分路器/延迟线。分路器的非延迟输出被馈送到示波器的外部触发输入(在这种情况下为CSA-803)。DL-11的延迟输出连接到示波器的输入。通过在触发器之后一次检查时钟流等于所使用的延迟(在这种情况下,47纳秒),触发边缘被定位。在识别出触发边缘之后,检查下一个边缘。然后产生测量的第二边缘抖动的直方图。
CSA-803用于其统计和直方图功能。这是一种有用的技术,受延迟线的长度和示波器的速度/灵敏度的限制。适用于大于1 /(2
 d),测量受示波器噪声的限制。低于1 /(2
d),测量受示波器噪声的限制。低于1 /(2
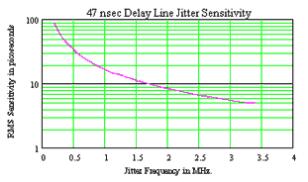
 d),灵敏度下降约2??0 dB / decade。对于图3中所示的47nsec延迟,转角频率出现在3.3MHz。使用CSA-803可以将3.3 MHz以上频率引起的所有抖动分解为大约5 ps。330 kHz时的抖动无法在50 ps以下解析。以类似的方式,在500 ps以下无法测量33 kHz的抖动。图4是使用47纳秒延迟线的RMS抖动灵敏度图。了解此测量方法的优点和局限性至关重要。对于给出的数值示例,将不会看到低于300 kHz的低频抖动。相反,可以很容易地识别由边带3.0 MHz偏移或更多引起的抖动。当测量采用直接倍频的振荡器或不考虑低频抖动时,该测试方法是合适的。(参见模式抖动的先前描述)。
d),灵敏度下降约2??0 dB / decade。对于图3中所示的47nsec延迟,转角频率出现在3.3MHz。使用CSA-803可以将3.3 MHz以上频率引起的所有抖动分解为大约5 ps。330 kHz时的抖动无法在50 ps以下解析。以类似的方式,在500 ps以下无法测量33 kHz的抖动。图4是使用47纳秒延迟线的RMS抖动灵敏度图。了解此测量方法的优点和局限性至关重要。对于给出的数值示例,将不会看到低于300 kHz的低频抖动。相反,可以很容易地识别由边带3.0 MHz偏移或更多引起的抖动。当测量采用直接倍频的振荡器或不考虑低频抖动时,该测试方法是合适的。(参见模式抖动的先前描述)。
Sens(f)= 其中:
Sens(f)=抖动灵敏度
 d =使用的延迟量
d =使用的延迟量
f =要测量的抖动频率
r =示波器分辨率
图4
使用锁相环的抖动测量
值得注意的是延迟的长度测量边缘抖动时,线路限制分辨率。为了测量低于100Hz偏移的抖动,人们只需要订购大约三百英里的极低损耗延迟线。代替这种装置,锁相环用于各种噪声测量。
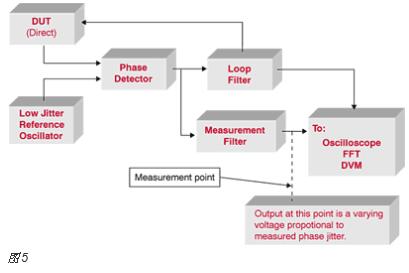
图4显示了用于测量时钟源噪声的锁相环(PLL)的基本元件。 Gardner [5], Best [6]和 Woolover [7]是理解PLL的三个很好的参考。一些关键循环要求如下:
o PLL环路带宽是成功测量的关键参数。系统仅测量环路带宽之外(高于)环路带宽的抖动频率。建议将环路带宽设置为最感兴趣的最低抖动频率的1/10。
o 环路阻尼必须设置为至少5,以减少PLL中的抖动峰值。抖动峰值会增加测量的抖动。
o 测量滤波器对应于Bellcore和ITU规范中建议的抖动带宽。有关抖动带宽和规格的列表,请参阅[2,3]。频带限制需要定义为任何有效测量的前提条件。
o 相位检测器(PD)的输出是变化的DC信号,其与由于抖动引起的变化相位成比例。有必要知道以伏特/弧度为单位的PD的增益常数(Kd),以便量化检测到的抖动。例如,对于具有10度的振荡器,Kd等于1毫伏/度的相位检测器将具有10mV的峰峰值输出。Pk-Pk抖动。可能需要注入已知量的抖动以校准系统以进行精确测量。
使用锁相环的抖动测量
:解释数据。
o 在时域中,图5中相位检测器的输出信号包含有关测量时钟抖动的大量信息。使用示波器直接检查信号可以显示Pk-Pk抖动。真正的RMS电压表可用于测量RMS(一个西格玛)抖动。对于这些测量,使用的测量滤波器代表感兴趣的抖动频率带是至关重要的。当需要10 kHz至1 MHz的带宽时,测量直流至10 MHz的噪声是没有意义的。具有直方图和统计功能的示波器可用于表征测量的抖动。
o 在频域中,来自图4中的相位检测器的输出信号的频谱表示频域中的频谱和抖动的相对幅度。使用低频或FFT分析仪检查频谱,可以在频谱方面提供最直观的时钟抖动图。通过在所关注的频率上积分信号抖动频谱,可以导出时钟的RMS抖动。这是用于表征抖动的最准确且最不幸的方法,需要专门的测试设备。数字示例如下所示,并包含在 附录A中。
指定抖动性能
只要符合以下条件,良好的抖动性能和低成本并不相互排斥:
o 抖动的系统要求根据幅度和频谱来定义。
o 用于生成时钟输出频率的方法对于应用来说是最佳的。
系统要求:
虽然无法解决所有可能的变化,但基于多年振荡器制造的一些一般性建议可能会有所帮助。
虽然不是对所有应用的完整调查,但表1是指定振荡器性能的起点。高于1 kHz的抖动被认为是高频抖动。
应用性能要求
表1
注1:总体抖动性能高度依赖于环路参数。
时钟产生:
可以采用各种方法来产生高频时钟。
根据所使用的技术,性能可能会有很大差异。低于20 MHz,可以假设直接晶体频率产生对于除最关键要求之外的所有要求都是足够的。对于20 MHz及以上的低抖动应用,应考虑低噪声选项。表2可用作选择具有成本效益的解决方案的起点。表2中列出的方法的变化和组合也可以是最佳解决方案。
抖动性能
表2
结论
为了正确指定频率源的性能,应考虑抖动频率和幅度。这需要了解抖动,测量技术及其局限性。花在确定系统需求上的时间将减少问题,并减少以后修复这些问题的时间。它还将为每种应用确定一种经济有效的方法。
在本文中,我们讨论了抖动的定义,用于描述抖动的单位,以及为什么抖动是一个重要参数。我们还回顾了用于测量抖动的技术,以及基于各种振荡器的应用和典型性能。讨论绝不是完整的,但应该给读者足够的信息来理解所涉及的问题。列出了行业标准,以及进一步阅读的参考资料。希望本文有用,并被认为是理解和指定抖动的良好起点。
这次讨论的目的有四个。
1. 直观地定义抖动,并讨论它的属性。
2. 解释抖动如何降低系统性能。
3. 描述测量抖动的各种实用方法,包括每种方法的相关性和易用性。
4. 提供指定高速时钟和相关设备的指南。
抖动定义:
o 抖动:“数字信号从其理想位置及时的重要瞬间的短期变化”(ITU)。
数字数据流中的预期边缘永远不会出现在所需的位置。定义和测量这些边沿的定时精度(抖动)对于同步通信系统的性能至关重要。
具有抖动边缘的数字波形
图1
术语的定义:
a. 以单位间隔表示的抖动:单个单位间隔是时钟频率的一个周期。这是标准化的时钟周期。以单位间隔表示的抖动将抖动的大小描述为一个单位间隔的小数部分。
b. 以度(度)表示的抖动:以度表示的抖动以度为单位描述抖动的幅度。其中一个周期等于360度。
c. 以绝对时间表示的抖动:以时间单位表示的抖动以适当的数量级(通常为皮秒)描述抖动的幅度。
d. 表示为功率测量的抖动以弧度或单位间隔平方为单位进行描述。通常以dB为单位表示相对于一个周期平方 (来自Bellamy) [1]
e. 模式抖动:模式相关的抖动。有时也称为翻边。本质上不随意。一般是次谐波的结果。在时域中查看时,它被视为多种抖动模式。模式抖动是确定性的,这是一种可归因于独特源的现象。本讨论中提到的所有其他抖动本质上是随机的,并且可能仅被描述为关于时间的随机变量。
例如:
假设时钟晶体振荡器速率为155.52 MHz。一个单位间隔将等于信号的周期,1 / 155.52MHz = 6.43nsec。= 360度
假设100 ps Pk-Pk的抖动。
100 Ps的抖动= .01555单位间隔(UI)的抖动= 5.598度。抖动 (所有Pk-Pk)所有三个测量都描述了相同的抖动量。
对于抖动功率,使用rms(一个sigma
| Pk-Pk抖动秒 | 学位 | 单位间隔 | 单位间隔 | 抖动功率 |
| 6.43E-09 =一个周期 | 学位(Pk-Pk) | Pk-Pk单位 | RMS单位 | dBui |
| 标准化 | 标准化 | 标准化 | ||
| 1.00E-10 | 5.60 | 0.015552 | 0.0022217 | -53.07 |
| 2.00E-11 | 1.12 | 0.003110 | 0.0004443 | -67.05 |
| (Pk-Pk的1/7 | ||||
| 近似) |
抖动带宽和频谱内容
图1中边缘的位移是噪声的结果。噪声具有光谱含量和功率。因此,图1中的边缘抖动也具有频谱内容。图1中的边缘随时间随机变化,但导致抖动的噪声在所有频率上不一定均匀。由于100 kHz噪声,10 kHz噪声引起的抖动可能大于或小于抖动。时钟抖动的频谱内容根据用于生成时钟的技术而有很大差异。测量的抖动也随测量技术和抖动带宽而变化。指定或测量的抖动不正确可能导致不必要的成本或系统性能不佳。参见参考文献[2,3]有关定义和指定电信系统中抖动的其他信息。各种时钟源的抖动特性将在本文后面讨论。
抖动如何影响系统性能
抖动对通信系统的影响远远超出了本讨论的范围。有关更彻底的治疗,请参阅参考文献[1,4]。简单的讨论可能有助于理解数字系统中抖动的有害影响。
通过同步通信系统传输的每一位数据都在接收器处对其值进行采样。采样数据只能具有逻辑1或0的值。采样数据的最佳点位于每个发送时钟周期的中心。为了执行此功能,接收器将其自己的时钟与用于传输数据的时钟对齐。图2,a,b和c分别表示理想的,典型的和损坏的数据流。通常称为“眼图”,每个图是由于噪声或抖动引起的边缘放置的累积图形画像。理想情况下,采样发生在“眼睛”的中心。随着边缘抖动的增加,明显的眼睛开始闭合。结果,出现错误的可能性,即.... 将逻辑1误认为是零的可能性更大。石英晶体振荡器噪声引起的抖动只是电信系统抖动的一个来源。系统设计人员必须考虑电信系统中的许多噪声源。时钟源引入的抖动是噪声的一个组成部分,只能成为“误差预算”的一部分,必须根据性能要求和成本进行权衡。
测量技术
时域测量
使用延迟线的边缘到边缘抖动
时钟抖动的真正衡量标准是时钟边沿随时间的精确位置。检查边缘位置的最直接方法是使用示波器观察边缘。遗憾的是,使用标准示波器技术无法在绝对时间内识别各个时钟边沿。使用标准示波器测量的任何抖动都是由于触发不稳定造成的。因此,使用示波器(即使是非常好的示波器)进行直接波形测量也不是有效的抖动测量。另一种技术用于定位参考边缘,与时间进行区分,并检查后续边缘上的抖动。图3以典型配置说明了这种方法。
被测单元的输出被馈入分路器/延迟线。分路器的非延迟输出被馈送到示波器的外部触发输入(在这种情况下为CSA-803)。DL-11的延迟输出连接到示波器的输入。通过在触发器之后一次检查时钟流等于所使用的延迟(在这种情况下,47纳秒),触发边缘被定位。在识别出触发边缘之后,检查下一个边缘。然后产生测量的第二边缘抖动的直方图。
CSA-803用于其统计和直方图功能。这是一种有用的技术,受延迟线的长度和示波器的速度/灵敏度的限制。适用于大于1 /(2
Sens(f)= 其中:
Sens(f)=抖动灵敏度
f =要测量的抖动频率
r =示波器分辨率
图4
使用锁相环的抖动测量
值得注意的是延迟的长度测量边缘抖动时,线路限制分辨率。为了测量低于100Hz偏移的抖动,人们只需要订购大约三百英里的极低损耗延迟线。代替这种装置,锁相环用于各种噪声测量。
图4显示了用于测量时钟源噪声的锁相环(PLL)的基本元件。 Gardner [5], Best [6]和 Woolover [7]是理解PLL的三个很好的参考。一些关键循环要求如下:
o PLL环路带宽是成功测量的关键参数。系统仅测量环路带宽之外(高于)环路带宽的抖动频率。建议将环路带宽设置为最感兴趣的最低抖动频率的1/10。
o 环路阻尼必须设置为至少5,以减少PLL中的抖动峰值。抖动峰值会增加测量的抖动。
o 测量滤波器对应于Bellcore和ITU规范中建议的抖动带宽。有关抖动带宽和规格的列表,请参阅[2,3]。频带限制需要定义为任何有效测量的前提条件。
o 相位检测器(PD)的输出是变化的DC信号,其与由于抖动引起的变化相位成比例。有必要知道以伏特/弧度为单位的PD的增益常数(Kd),以便量化检测到的抖动。例如,对于具有10度的振荡器,Kd等于1毫伏/度的相位检测器将具有10mV的峰峰值输出。Pk-Pk抖动。可能需要注入已知量的抖动以校准系统以进行精确测量。
使用锁相环的抖动测量
:解释数据。
o 在时域中,图5中相位检测器的输出信号包含有关测量时钟抖动的大量信息。使用示波器直接检查信号可以显示Pk-Pk抖动。真正的RMS电压表可用于测量RMS(一个西格玛)抖动。对于这些测量,使用的测量滤波器代表感兴趣的抖动频率带是至关重要的。当需要10 kHz至1 MHz的带宽时,测量直流至10 MHz的噪声是没有意义的。具有直方图和统计功能的示波器可用于表征测量的抖动。
o 在频域中,来自图4中的相位检测器的输出信号的频谱表示频域中的频谱和抖动的相对幅度。使用低频或FFT分析仪检查频谱,可以在频谱方面提供最直观的时钟抖动图。通过在所关注的频率上积分信号抖动频谱,可以导出时钟的RMS抖动。这是用于表征抖动的最准确且最不幸的方法,需要专门的测试设备。数字示例如下所示,并包含在 附录A中。
指定抖动性能
只要符合以下条件,良好的抖动性能和低成本并不相互排斥:
o 抖动的系统要求根据幅度和频谱来定义。
o 用于生成时钟输出频率的方法对于应用来说是最佳的。
系统要求:
虽然无法解决所有可能的变化,但基于多年振荡器制造的一些一般性建议可能会有所帮助。
虽然不是对所有应用的完整调查,但表1是指定振荡器性能的起点。高于1 kHz的抖动被认为是高频抖动。
应用性能要求
| 系统应用 | 难度 | 低频率 | 高频 | 可能 |
| 抖动重要性 | 抖动重要性 | 类型 | ||
|
看看 表2 |
||||
| 雷达 | 非常困难的噪音应用 | 危急 | 危急 | A B C D |
| 超声/ MRI | 非常困难的噪音应用 | 危急 | 危急 | A B C D |
| 导航/ GPS | 难以应用的噪音 | 危急 | 高 | A B C D |
| 传输系统(电信) | ||||
| 公共网络 | 中等噪声应用 | 中等 | 中等 | A B C D |
| 专用网络(LAN) | 通常最简单的应用 | 低 | 低 | A,B,F |
| 频率合成(见注1) | ||||
| 低频率 参考 | 中度严重 | 中度低 | A,B,C | |
| 高频源 | 中度低 | 中度严重 | D,E,F |
注1:总体抖动性能高度依赖于环路参数。
时钟产生:
可以采用各种方法来产生高频时钟。
根据所使用的技术,性能可能会有很大差异。低于20 MHz,可以假设直接晶体频率产生对于除最关键要求之外的所有要求都是足够的。对于20 MHz及以上的低抖动应用,应考虑低噪声选项。表2可用作选择具有成本效益的解决方案的起点。表2中列出的方法的变化和组合也可以是最佳解决方案。
抖动性能
| 技术 | 成本 | LF抖动 | 高频抖动 | 评论 | 类型 |
| 1是最低的 | 1是最好的 | 1是最好的 | |||
| 3是最高的 | 3是最糟糕的 | 3是最糟糕的 | |||
| 直接时钟/ TCXO | 1 | 2 | 1或2 | 非常好的抖动 | 一个 |
| 直接VCXO | 2 | 1 | 1或2 | 非常好的抖动 | 乙 |
| 直接烤箱 | 3 | 1 | 1 | 优秀的抖动 | C |
| 调谐乘法 | 2 | 1 | 1或2 | 周期性抖动 | d |
| 离散PLL | 2 | 2 | 2或3 | 好抖动 | Ë |
| 单片PLL | 1 | 3 | 2或3 | 关闭抖动很差 | F |
结论
为了正确指定频率源的性能,应考虑抖动频率和幅度。这需要了解抖动,测量技术及其局限性。花在确定系统需求上的时间将减少问题,并减少以后修复这些问题的时间。它还将为每种应用确定一种经济有效的方法。
在本文中,我们讨论了抖动的定义,用于描述抖动的单位,以及为什么抖动是一个重要参数。我们还回顾了用于测量抖动的技术,以及基于各种振荡器的应用和典型性能。讨论绝不是完整的,但应该给读者足够的信息来理解所涉及的问题。列出了行业标准,以及进一步阅读的参考资料。希望本文有用,并被认为是理解和指定抖动的良好起点。
正在载入评论数据...
相关资讯
- [2023-07-12]康纳温菲尔德推出符合Stratum3E...
- [2023-06-26]选择石英晶体要了解的必要参数,...
- [2023-06-25]艾伯康公司发布连续电压有源晶振...
- [2021-01-18]今日主题:什么样性能的石英晶振...
- [2021-01-13]是什么原因造成晶振相噪恶化?都...
- [2020-12-09]干货干货!爱普生旗下SG-8018系列...
- [2020-09-08]石英Crystal工作原理是怎样的,这...
- [2020-09-01]Oscillator的制造流程究竟是怎样...